Pulse Width Modulation (PWM) is the process of
alternating a signal between two extreme values with little to no
intermediate steps. On the Netduino, these values are 0v and 3.3v.
In its most basic form, the output resembles a square wave, where
both the min and max values have the same duration.
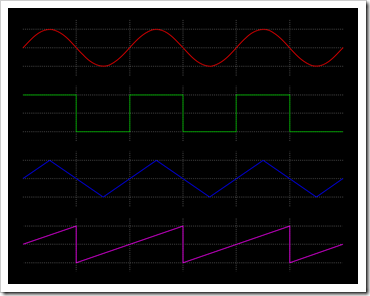
The square wave (which can be created with PWM) is the second
down. The others, from the top are: sine wave, triangle wave and
sawtooth wave. The place I always ran into these was in synthesizer
work. For example, I supported all four waveforms in my Silverlight
Synthesizer project.
For some of you, this may seem insanely simple, but for
those of us just starting out in electronics, this is quite an
adventure :)
PWM is used to control a number of things from servo motors (PWM
is used in my CNC setup) to the level of output in LEDs to, what I
intend to use it for shortly, serving as a clock signal for another
chip. In my case, the chip will be a MOS 8580 SID chip salvaged
from an old Commodore 64c. That'll be detailed in a later post
once I get things working.
PWM on the Netduino
Four of the output ports (Digital pins 5, 6, 9 and 10) on the
Netduino may be used for PWM signals. I'm using a new Netduino Plus
beta, but the tech
specs in this area are identical. PWM in the current firmware
release is somewhat limited, but from reading Chris's posts on the
forums the 4.1.1 revision of the firmware should have some real
advancements in these areas.
Currently, the standard PWM clock is set to 10Khz. If you set
the duty cycle, it will be based on that clock. One of the expected
upcoming changes will be to have finer control over the clock, and
hopefully support Mhz clock and PWM rates.
Using PWM is pretty simple. Instead of creating an OutputPort,
you'll create an instance of the PWM class. Once you do that, you
can either set the Duty Cycle or call SetPulse.
In this case, we'll call SetPulse and have the pulse on 1/3 of
the time (basically a 33% duty cycle)
public class Program
{
public static void Main()
{
PWM pwm = new PWM(Pins.GPIO_PIN_D5);
const uint period = 3 * 1000 * 1000; // 3 ms
const uint duration = 1 * 1000 * 1000; // 1 ms
pwm.SetPulse(period, duration);
}
}
Doing that, creates the following waveform:
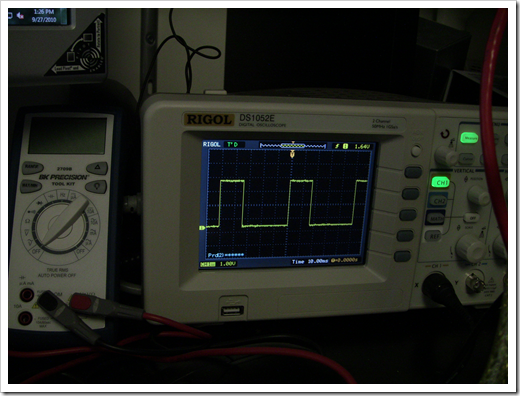
(the scope lets me save the image to a USB key, but I just
unboxed it today. Photo snapshots will need to suffice for now)
The first parameter of SetPulse is the period, the second is the
duration. Some definitions:
| Duty Cycle |
Proportion of "on" time vs. the
period. Expressed as a percent with 100% being fully on. This is
used only with SetDutyCycle and the default clock rate. |
| Period |
"Peak to Peak" time. This is in
microseconds (1/1,000,000 second). Used in SetPulse. |
| Duration |
Duration of the "on" time for a cycle.
This is also in microseconds. This needs to be less than the
Period. Used in SetPulse. |
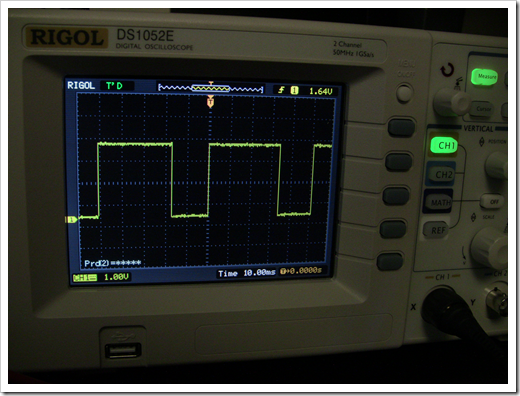
If you want to have the opposite effect; that is, a pulse that
is on 2/3 of the time, the code would look like this:
public class Program
{
public static void Main()
{
PWM pwm = new PWM(Pins.GPIO_PIN_D5);
const uint period = 3 * 1000 * 1000; // 3 ms
const uint duration = 2 * 1000 * 1000; // 2 ms
pwm.SetPulse(period, duration);
}
}
The resulting waveform looks like this. Notice how it is now
"on" for 2/3 of the time:
Uses for PWM
In its current form, you can use PWM on the Netduino to control
servos (not directly, you'll want to use it to trigger something
with more volts/amps) and control the brightness of LEDs. You can
also use it as a clock signal for relatively slow clocks. When the
new firmware comes out, I hope to use PWM to clock the MOS 8580 SID
chip I have sitting in a breadboard on my desk.
About the Netduino
The Netduino is a 100% open source hardware and software
platform, pin compatible with the Arduino. It runs the .NET Micro
Framework; you write code using Visual Studio 2010. For more
information, see the official Netduino site.
(source code for this example is included below)